The modular design of our our overload relays allows for direct mounting onto contactors providing complete 3 phase motor overload protection.
Introducción a los motores
Los motores eléctricos son un componente integral de los equipamientos industriales, juguetes, vehículos y dispositivos electrónicos. Están diseñados para convertir energía eléctrica en energía mecánica. Estos dispositivos pueden estar alimentados por fuentes de CA o CC. Sopladores, ventiladores, compresores, grúas, extrusoras y trituradoras son algunos dispositivos importantes equipados con motores eléctricos.
¿Qué es un motor de inducción?
Un motor de inducción, también conocido como motor asíncrono, es uno de los principales tipos de motores eléctricos de CA utilizados en entornos comerciales e industriales. Estos motores cuentan con un rotor comúnmente llamado jaula de ardilla y funcionan según el principio de inducción electromagnética. El campo electromagnético en el rotor es producido por el campo giratorio del estator. En resumen, la potencia se transfiere al devanado del rotor por el estator mediante inducción. Hay dos tipos principales de motores de inducción: motores de inducción monofásicos y motores de inducción trifásicos.
Introducción a los motores de inducción trifásicos
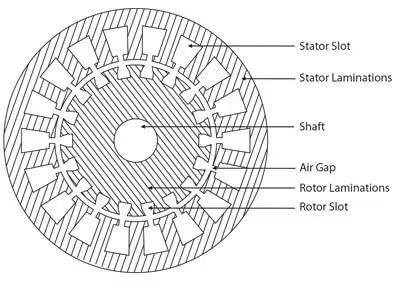
Es uno de los tipos de motores eléctricos más utilizados; y es parte integral de casi el 80% de las aplicaciones industriales. Su popularidad se debe a la construcción robusta, las excelentes características de funcionamiento, la regulación de velocidad y la ausencia de conmutador. Como cualquier motor de inducción normal, este motor consta de un estator y un rotor.
- Estator: es la parte fija de una máquina rotativa y uno de los dos elementos fundamentales para la transmisión de potencia. El estator es un tambor con forma cilíndrica que lleva el núcleo cilíndrico del rotor. Cuenta con diferentes estampados ranurados para transportar bobinados trifásicos. Los devanados del estator son bobinas desfasadas a 120 grados.
- Rotor: Es el componente que gira en una máquina eléctrica. El rotor presenta ranuras cilíndricas laminadas con conductores de cobre o aluminio que tienen extremos unidos. Es el eje del motor.
El rotor del motor de inducción trifásico se clasifica como rotor devanado de fase o rotor bobinado y rotor de jaula de ardilla. Entre estos dos, el rotor de jaula de ardilla es uno de los más comunes.
Motores de inducción de jaula de ardilla
Los motores de inducción equipados con un rotor de jaula de ardilla se conocen como motores de inducción de jaula de ardilla Reciben este nombre ya que el ensamblado se parece a las pequeñas jaulas rotativas para ejercitar mascotas como hámsteres. Estos motores están disponibles en tamaños que van desde una potencia fraccionaria (HP) menor a un kilovatio hasta 10,000 HP (decenas de megavatios). Son muy populares debido a factores tales como la simplicidad, la construcción robusta y la velocidad constante en diferentes tamaños de carga. Como otros motores de inducción, el motor de jaula de ardilla consta de:
Rotor: un componente de forma cilíndrica montado sobre un eje. Contiene barras conductoras organizadas longitudinalmente. Las barras están hechas de cobre o aluminio y están colocadas en ranuras, que están conectadas en los extremos para formar una estructura similar a una jaula. El rotor tiene un núcleo laminado, que ayuda a evitar la pérdida de potencia debido a la histéresis y las corrientes de Foucault. Los conductores del rotor están sesgados, lo que ayuda a evitar el engranaje durante el arranque del equipo. Además, este sesgo asegura una relación de transformación mejorada entre el rotor y el estator.
Estator: Consiste en un devanado trifásico a lo largo del núcleo. El estator se coloca en una carcasa metálica. Los devanados en el estator están organizados de manera que estén separados 120 grados en el espacio y montados sobre un núcleo de hierro laminado. Este núcleo de hierro proporciona una ruta de reticencia para el flujo generado por las corrientes de CA.
¿Qué es la protección contra sobrecargas?
Cuando el motor consume un exceso de corriente, se denomina sobrecarga. Esto puede causar un sobrecalentamiento del motor y dañar los devanados del motor. Debido a esto, es importante proteger el motor, el circuito derivado del motor y los componentes del circuito derivado del motor de condiciones de sobrecarga. Los relés de sobrecarga protegen el motor, el circuito derivado del motor y los componentes del circuito derivado del motor del calor excesivo de la condición de sobrecarga. Los relés de sobrecarga forman parte del arrancador de motor (conjunto de contactor más relé de sobrecarga). Protegen el motor monitoreando la corriente que fluye en el circuito. Si la corriente se eleva por encima de un cierto límite durante un cierto período de tiempo, entonces el relé de sobrecarga se disparará, operando un contacto auxiliar que interrumpe el circuito de control del motor, desenergizando el contactor. Esto conduce a la eliminación de la energía del motor. Sin energía, el motor y los componentes del circuito del motor no se sobrecalientan ni se dañan. El relé de sobrecarga se puede restablecer manualmente y algunos relés de sobrecarga se restablecerán automáticamente después de un cierto período de tiempo. Después de lo cual, se puede reiniciar el motor.
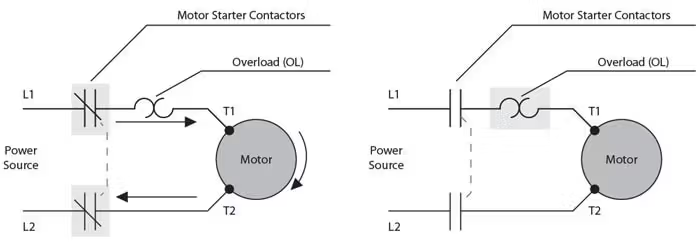
El relé de sobrecarga está cableado en serie con el motor, por lo que la corriente que fluye al motor cuando el motor está funcionando también fluye a través del relé de sobrecarga. Se disparará a un cierto nivel cuando haya un exceso de corriente fluyendo a través de él. Esto hace que se abra el circuito entre el motor y la fuente de alimentación. El relé de sobrecarga se puede restablecer manual o automáticamente después de un período de tiempo predeterminado. El motor se puede reiniciar después de que se haya identificado y rectificado la causa de la sobrecarga.
-------
Any paragraph text you have written below will "float" up and around this image here.
-------
Tipos de relés térmicos de sobrecarga
Relé de sobrecarga bimetálico
Muchos relés de sobrecarga incluyen elementos bimetálicos o tiras bimetálicas, también conocidas como elementos calefactores. Las tiras bimetálicas están compuestas por dos tipos de metales, uno de bajo coeficiente de dilatación y otro de alto coeficiente de dilatación, estas tiras bimetálicas se calientan mediante una bobina alrededor de la tira bimetálica, que lleva la corriente. Ambas tiras de metal se expandirán debido al calor. Sin embargo, el metal con un alto coeficiente de dilatación se expandirá más en comparación con el metal con un bajo coeficiente de dilatación. Esta diferente expansión de las tiras bimetálicas hace que el bimetal se doble hacia el metal con un bajo coeficiente de dilatación. A medida que la tira se dobla, acciona un mecanismo de contacto auxiliar y hace que el contacto normalmente cerrado del relé de sobrecarga se abra. Como resultado, el circuito de la bobina del contactor se interrumpe. La cantidad de calor generado se puede calcular mediante la Ley de calentamiento de Joule. Se expresa como H ∝ I2Rt.
- I es intensidad de corriente que fluye a través de la bobina alrededor de la tira bimetálica del relé de sobrecarga.
- R es la resistencia eléctrica del devanado alrededor de la tira bimetálica.
- t es el período de tiempo durante el cual la corriente I fluye a través del devanado alrededor de la tira bimetálica.
La ecuación anterior define que el calor producido por el devanado será directamente proporcional al período de tiempo del flujo de intensidad de corriente a través del devanado. En otras palabras, cuanto menor sea la corriente, más tardará el relé de sobrecarga en dispararse y cuanto mayor sea la corriente, más rápido se disparará el relé de sobrecarga; de hecho, se disparará mucho más rápido porque la operación del relé es una función del actual al cuadrado. Los relés de sobrecarga bimetálicos a menudo se especifican cuando se requiere un reinicio automático del circuito y se produce porque el bimetal se ha enfriado y ha vuelto a su estado original (forma). Una vez que esto sucede, el motor puede reiniciarse. Si no se corrige la causa de la sobrecarga, el relé se disparará nuevamente y se reiniciará a intervalos predeterminados. Es importante tener cuidado durante la selección de un relé de sobrecarga, porque los disparos y reinicios repetidos pueden reducir la vida mecánica del relé y pueden causar daños al motor. En muchas aplicaciones, el motor se instala en un espacio que mantenga una temperatura ambiente constante. El relé de sobrecarga y el arrancador del motor pueden instalarse en una ubicación diferente, que experimente diferentes temperaturas ambientales. En tales aplicaciones, el punto de disparo del relé de sobrecarga puede variar dependiendo de múltiples factores. El flujo de corriente a través del motor y la temperatura del aire circundante son dos factores que pueden causar un disparo prematuro. En estos casos, se utilizan relés de sobrecarga bimetálicos con compensación ambiental. Los relés de este tipo cuentan con dos tipos de tiras bimetálicas: una tira bimetálica de compensación y una tira bimetálica principal. Ambas tiras se doblarán por igual si están a temperatura ambiente, evitando así que el relé de sobrecarga realice disparos innecesarios. Sin embargo, la tira bimetálica principal es la única tira que se ve afectada por el flujo de corriente a través del conductor y el motor. Si hubiera una sobrecarga, la unidad de disparo se activará mediante la tira bimetálica principal.
Relé de sobrecarga de aleación eutéctica
Este tipo de relé de sobrecarga consiste de una bobina de calentador, un mecanismo mecánico para la activación de un dispositivo de disparo y una aleación eutéctica. Una aleación eutéctica es una combinación de dos o más materiales, que se solidifica o funde a una temperatura determinada.-------
Any paragraph text you have written below will "float" up and around this image here.
-------
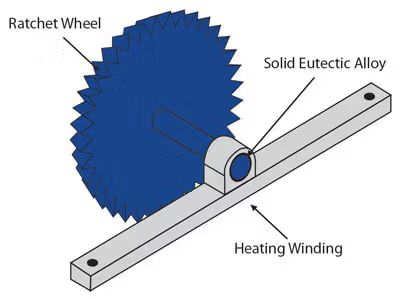
En el relé de sobrecarga, la aleación eutéctica está contenida en un tubo, que a menudo se usa junto con una rueda dentada (trinquete) con resorte para activar el dispositivo de disparo durante las operaciones de sobrecarga. La corriente del motor pasa a través de la pequeña bobina de calentador. Durante la sobrecarga, la bobina de calentador calienta el tubo de aleación eutéctica. La aleación se derrite debido al calor, lo que libera al trinquete y permite que gire. Esta acción inicia la apertura de los contactos auxiliares en el relé de sobrecarga. Los relés de sobrecarga eutécticos solo se pueden restablecer manualmente después de dispararse. Este reinicio generalmente se realiza a través de un botón de reinicio, que se coloca en la tapa del relé. El calefactor instalado en el relé se elige sobre la base de la carga de corriente total del motor.
Relé de sobrecarga de estado sólido
Estos relés se denominan comúnmente relés de sobrecarga electrónicos. A diferencia de los relés de sobrecarga bimetálicos y eutécticos, estos relés de sobrecarga electrónicos miden la corriente electrónicamente. Aunque están disponibles en varios diseños, comparten características y beneficios comunes. El diseño sin calentador es una de las principales ventajas de estos relés. Este diseño ayuda a reducir los costos y esfuerzos de instalación. Además, el diseño sin calefactor es insensible al cambio en la temperatura ambiente, lo que ayuda a minimizar los disparos no deseados. Estos relés también brindan protección contra la pérdida de fase, más eficazmente que los relés de sobrecarga bimetálicos o de aleación eutéctica. Estos relés pueden detectar fácilmente una pérdida de fase y operar un contacto auxiliar para abrir el circuito de control del motor. Los relés de sobrecarga de estado sólido permiten un fácil ajuste de los tiempos de disparo y los puntos de ajuste.
Disparo del relé de sobrecarga
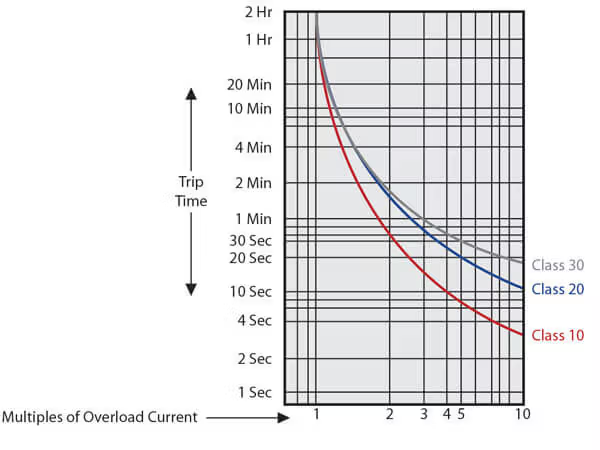
El tiempo de disparo de un relé de sobrecarga disminuirá cuando aumenta la corriente. Esta función se traza en la curva de tiempo inverso a continuación y se denomina tipo de disparo. El tipo de disparo también indica el tiempo que tarda el relé en abrirse en una condición de sobrecarga.
Esperamos que este breve artículo les haya proporcionado una comprensión básica de los relés de sobrecarga. Para leer artículos adicionales puede ingresar al blog de c3controls en c3controls.com/blog.
Descargo de responsabilidad: El contenido proporcionado en este documento técnico está destinado únicamente a fines de brindar información general y se proporciona en el entendimiento de que los autores y editores no se dedican a la prestación de servicios de ingeniería, consultoría u otros servicios profesionales. La práctica de la ingeniería está impulsada por circunstancias específicas y únicas para cada proyecto. En consecuencia, cualquier uso de esta información debe realizarse solo con previa consulta a un profesional calificado y con licencia que pueda tener en cuenta todos los factores relevantes y los resultados deseados. La información de este documento técnico se publicó con un cuidado y una atención razonables. Sin embargo, es posible que parte de la información contenida en estos documentos técnicos esté incompleta, sea incorrecta o no se aplique a circunstancias o condiciones particulares. No aceptamos responsabilidad por pérdidas directas o indirectas que resulten de usar, confiar o actuar sobre la información en este documento técnico.
ISO 9001:2015
Certificado
Más de 17 millones de productos
Configuraciones
Toda la vida
Garantía
Garantizado
Envíos en el mismo día
Precios ventajosos
Ahorre hasta un 40%
c3controls Headquarters, USA
664 State Avenue
Beaver, PA 15009